


L’esigenza di mettere in comunicazione il trattore con le attrezzature può essere fatta risalire agli inizi degli anni 90, ma solo nel 2000 il protocollo di comunicazione (Isobus) arriva a codificare il connettore di connessione, un momento importante che porta le case costruttrici a montare sul trattore un unico terminale, mediante il quale poter comandare qualsiasi attrezzatura fosse collegata al trattore stesso. Negli anni seguenti vengono sviluppate nuove centraline elettroniche. In particolare oggi siamo arrivati alla Tecu di Classe III, ossia una centralina montata sul trattore che è in grado di ricevere comandi anche da parte dell’attrezzatura. Questo è un passo fondamentale verso l’automazione del rapporto trattore-attrezzatura, che consente di massimizzare l’efficienza delle operazioni di campo. I primi esempi, i più importanti, sono proprio nella fienagione, in cui le macchine da raccolta trasmettono al trattore alcuni input fondamentali per poter ottimizzare la formazione della balla durante la raccolta.
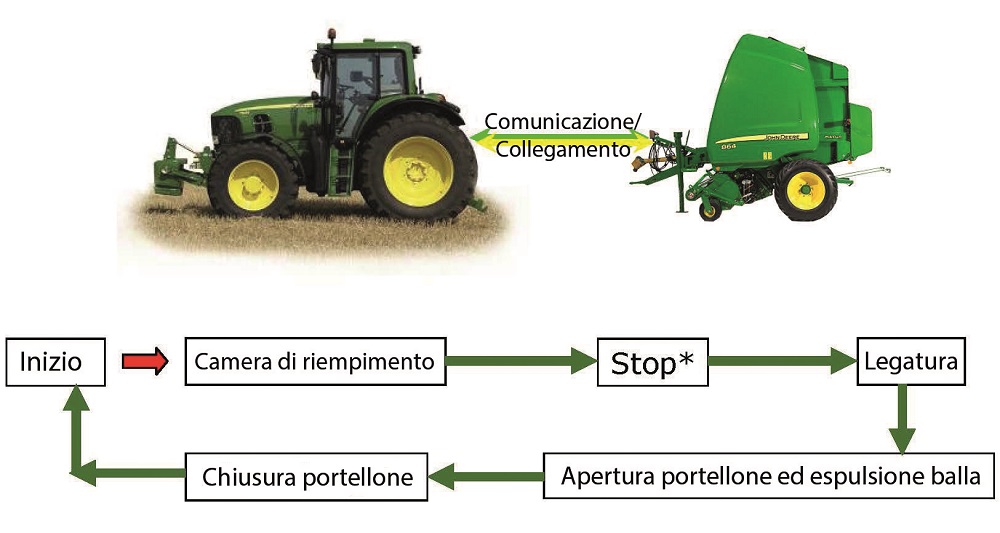
A dire il vero, già nel 2011 John Deere ad Agritechnica aveva ricevuto la medaglia d’argento per l’automazione tra trattore e attrezzatura, che consentiva lo scambio bidirezionale dei dati più complessi tramite un sistema Isobus ampliato, grazie al quale l’attrezzo assumeva il comando di alcune funzioni prestabilite del trattore. Allora John Deere presentò la rotopressa 864 che comunicava quando la balla era quasi terminata, rallentando il trattore fino ad arrestarlo. Iniziava così l’operazione di legatura a rete. Infine la pressa scaricava automaticamente la balla prima di iniziare il ciclo successivo. Il controllo automatico delle funzioni del trattore (marcia in avanti e funzionamento dell’idraulica e della presa di forza) si otteneva grazie alla configurazione aperta dell’Isobus, che ne consentiva l’impiego anche su macchine di altri marchi.
Oggi John Deere propone il suo sistema nella rotopressa Serie 900 che, quando la balla ha raggiunto le dimensioni desiderate, invia un segnale che comunica alla trasmissione di arrestare il trattore, quindi avvia la legatura a rete o la fasciatura e la sequenza di espulsione. Il trattore deve essere ovviamente Isobus compatibile, dotato di trasmissione Auto Power e con distributore elettroidraulico a controllo elettronico.
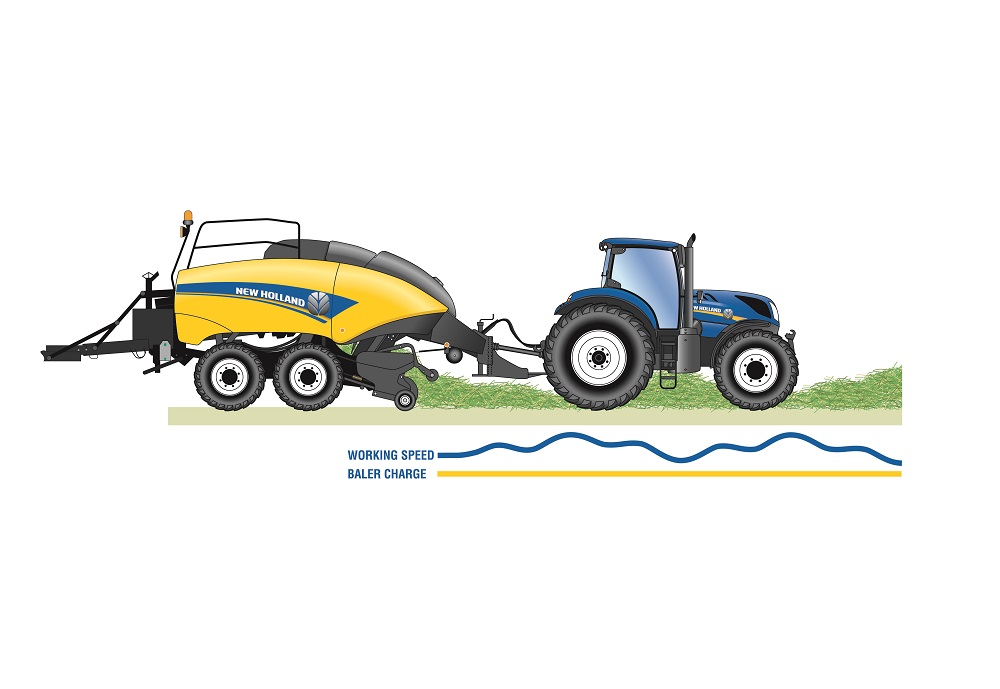
A onor di cronaca, un’applicazione simile, realizzata da Pöttinger per un carro autocaricante, era stata anch’essa premiata con una medaglia d’argento ad Agritechnica nel 2009. In pratica, il carro autocaricante, in caso di necessità, non solo ferma il trattore, ma gestisce anche la velocità di marcia del carro in base all’intensità di andanatura.
Sensori ad ultrasuoni, posizionati nella parte frontale del trattore, individuano la forma dell’andana, per cui, grazie al rilevamento anticipato, il trattore ha un tempo di reazione sufficiente per adeguare la velocità. Poiché non viene solo prefissato un valore nominale per la velocità, ma anche pilotata l’accelerazione, il sistema lavora in combinazione con un sistema raffinato di sensori sul carro autocaricante in tutte le velocità di marcia rilevanti.
Leggi l'articolo completo su Macchine e Motori Agricoli n. 3/2016 - L'edicola di Macchine e Motori Agricoli








{kind=link}